Saturday, April 1, 2023 | 1 minute
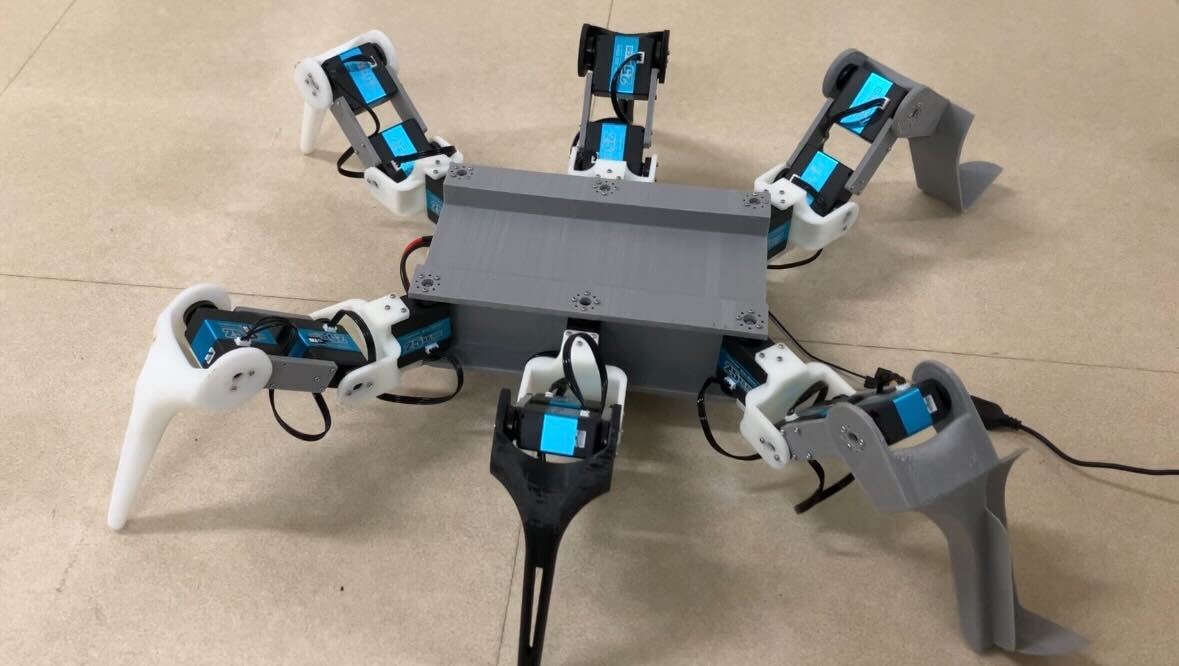
1脚3関節の6脚ロボットをチームで作成しました。私は主にリーダー、電子回路、内部システムを担当しました。
開発言語はPython、ミドルウェアとしてROSを使用しています。